Heading Tàu Biển Là Gì? Ảnh Hưởng Tới Độ Chính Xác Radar & ECDIS
Trong hệ thống dẫn đường hàng hải hiện đại, heading tàu biển là dữ liệu nền tảng quyết định độ chính xác của Radar, ECDIS, ARPA, Autopilot và Track Control. Chỉ cần sai số heading nhỏ (0.5–1 độ), các hệ thống này có thể hiển thị lệch mục tiêu, sai CPA/TCPA, thậm chí gây rủi ro va chạm khi tàu hành trình ở vùng nước đông đúc.
Bài viết này giúp bạn hiểu rõ:
-
Heading tàu biển là gì
-
Sai số heading ảnh hưởng thế nào đến Radar & ECDIS
-
Vì sao la bàn quang (Fiber Optic Gyrocompass) là giải pháp heading ổn định, đáp ứng yêu cầu PSC và IMO
1. Heading tàu biển là gì?
1.1 Khái niệm Heading (HDG)
Heading tàu biển là hướng mũi tàu đang chỉ tới, được đo so với Bắc thật (True North) và biểu diễn bằng độ từ 000° đến 359°.
Theo tiêu chuẩn IMO, heading dùng cho các hệ thống:
-
Radar ARPA
-
ECDIS
-
Autopilot
-
AIS, INS
-
VDR, BAM
Dữ liệu heading thường được truyền dưới dạng câu HDT / THS theo chuẩn IEC 61162-1 / IEC 61162-2.
1.2 Phân biệt Heading – Course – Bearing
Đây là nhầm lẫn rất phổ biến trên tàu:
| Thuật ngữ | Ý nghĩa |
|---|---|
| Heading | Hướng mũi tàu thực tế |
| Course | Hướng tàu di chuyển theo track |
| Bearing | Phương vị mục tiêu so với tàu |
Radar & ECDIS luôn dùng Heading, không phải Course.
Vì vậy, heading sai = toàn bộ hiển thị sai.
2. Sai số Heading ảnh hưởng Radar & ECDIS như thế nào?
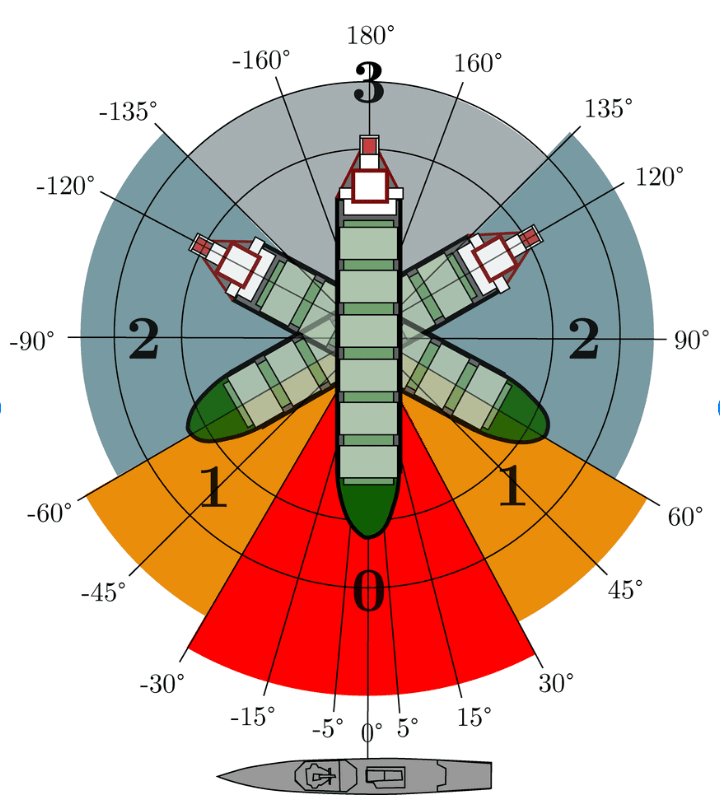
2.1 Ảnh hưởng trực tiếp đến Radar ARPA
Radar ARPA sử dụng heading để:
-
Xác định hướng quét anten
-
Tính toán CPA/TCPA
-
Ổn định mục tiêu khi tàu quay
Nếu heading bị lệch 1°:
-
Mục tiêu radar bị xoay lệch
-
Vector chuyển động không chính xác
-
CPA/TCPA tính sai → đánh giá nhầm nguy cơ va chạm
Đây là lỗi PSC thường phát hiện khi so sánh radar với visual bearing.
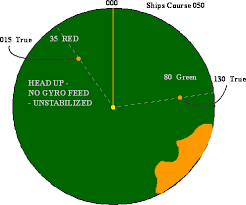
2.2 Sai số Heading tàu biển gây lệch hiển thị ECDIS
Trên ECDIS:
-
Heading dùng để xoay bản đồ (Head-up / Course-up)
-
Đồng bộ dữ liệu GNSS – Gyro – Speed Log
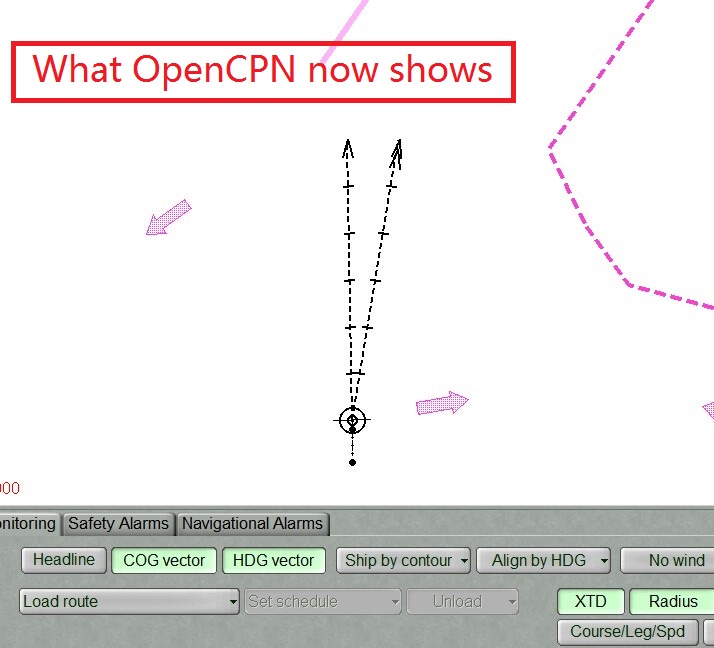
Khi heading không ổn định:
-
Track tàu lệch so với thực tế
-
Waypoint approach sai
-
Cross Track Error hiển thị không đúng
PSC thường ghi nhận lỗi:
“Heading input to ECDIS unstable / inconsistent with ship’s movement”
2.3 Ảnh hưởng đến Autopilot & Track Control
Autopilot sử dụng heading để:
-
Giữ hướng tàu
-
Điều khiển bánh lái
Heading nhiễu hoặc trôi sẽ gây:
-
Tàu “hunt” lái
-
Tăng tiêu hao nhiên liệu
-
Lái không ổn định khi chạy biển dài
3. Nguyên nhân gây sai số Heading trên tàu
3.1 La bàn từ (Magnetic Compass) không còn phù hợp
La bàn từ:
-
Bị ảnh hưởng từ trường
-
Cần hiệu chỉnh thường xuyên
-
Không đáp ứng yêu cầu dữ liệu số cho ECDIS & Radar hiện đại
Trên tàu đóng mới, la bàn từ chỉ còn vai trò dự phòng.
3.2 Gyro con quay cũ – trôi và bảo trì cao
La bàn điện:
-
Thời gian ổn định dài
-
Cần bảo trì dung dịch, vòng bi
-
Dễ trôi heading khi rung động
Nhiều tàu cải hoán đang thay thế gyro con quay bằng la bàn quang.
4. La bàn quang NGC-5050 giải quyết vấn đề Heading như thế nào?
4.1 Công nghệ Fiber Optic Gyro (FOG)
La bàn quang NGC-5050 sử dụng công nghệ Fiber Optic Gyro:
-
Không có bộ phận quay cơ khí
-
Không bị ảnh hưởng bởi từ trường
-
Độ ổn định cao khi tàu rung, lắc
Sản phẩm do New Sunrise Co., Ltd. sản xuất, chuyên về thiết bị Nav & Comm hàng hải.
4.2 Độ chính xác Heading phù hợp Radar & ECDIS
Thông số heading của NGC-5050:
-
Độ chính xác ≤ 0.5° × secφ
-
Thời gian ổn định ~10-20 phút
-
Output HDT / THS đa cổng RS422
Đáp ứng đầy đủ yêu cầu:
-
Radar ARPA
-
ECDIS Dual system
-
Autopilot
-
INS / BAM
4.3 Heading ổn định – yếu tố then chốt khi PSC kiểm tra
NGC-5050 đáp ứng:
-
SOLAS V/19
-
IMO A.424(XI), A.821(19)
-
ISO 8728:2024
-
MED Wheelmark – DNV
Khi PSC kiểm tra:
-
Heading ổn định
-
Không trôi khi đổi hướng
-
Dữ liệu khớp Radar – ECDIS – Visual bearing
5. Khi nào tàu cần nâng cấp la bàn quang?
Bạn nên cân nhắc nâng cấp sang la bàn quang NGC-5050 khi:
-
Radar & ECDIS hiển thị lệch so với thực tế
-
Autopilot lái không ổn định
-
PSC từng ghi nhận lỗi heading
-
Tàu cải hoán, đóng mới theo tiêu chuẩn mới
Kết luận
Heading tàu biển không chỉ là một con số hiển thị trên màn hình, mà là dữ liệu gốc quyết định an toàn hàng hải. Sai số heading dù nhỏ cũng có thể gây:
-
Lệch Radar
-
Sai ECDIS
-
Rủi ro va chạm
Với công nghệ Fiber Optic Gyro, la bàn quang NGC-5050 mang lại:
-
Heading chính xác
-
Ổn định dài hạn
-
Phù hợp PSC – SOLAS – tàu hiện đại

Tiêu Chuẩn IMO-MSC.512(105) cho MF HF
Tiêu Chuẩn IMO-MSC.516(105) cho NAVTEX

